De la apariția roboților în istoria tehnologiei, transformările pe care le-au suferit aceștia au fost numeroase. De la primul robot industrial realizat în anul 1937 și până astăzi, când s-a ajuns la utilizarea la scară largă a roboților colaborativi, pare a fi doar un pas de-a lungul timpului.
Însă un pas important, deoarece roboții, fie ei industriali clasici sau colaborativi, ajută astăzi oamenii în activitatea de producție, fiind extrem de eficienți și ajutând în diverse aplicații industriale mai mult sau mai puțin dificile.
Robotul înainte de cobot
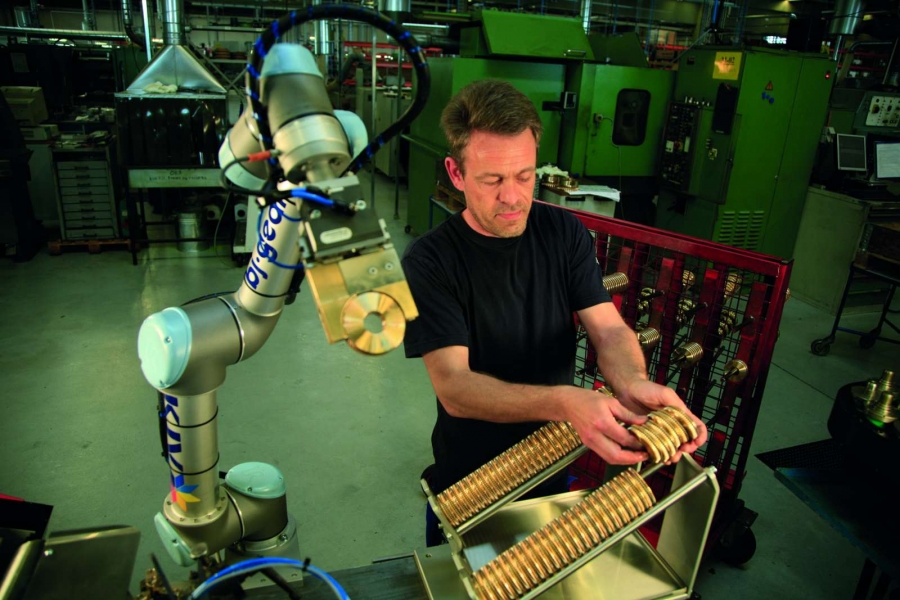
Roboții apar pe piața internațională din Europa în 1973, iar interesul pentru aceștia crește treptat, de la an la an. În 1980 are chiar o revoluție a roboților industriali, iar în curând apar noi tendințe în această ramură. Mai târziu, apar coboții, aceștia fiind, de fapt, roboți care sunt programați să comunice fizic cu angajații care se află într-un spațiu de desfășurare a activității profesionale. Mai mult decât atât, un cobot este programat să funcționeze autonom într-un spațiu închis, însă colaborarea cu angajații este cea care face din acesta soluția ideală atunci când este vorba despre o productivitate crescută care poate fi obținută cu ajutorul unui simplu braț mecanic.
Drumul important pe care îl încep roboții colaborativi începe în 2008, atunci când cel mai mare furnizor de roboți din lume, Universal robots, își lansează primul cobot, un robot colaborativ UR5. Treptat, apar noi modele de roboti industriali care sunt folosiți în aplicații generale sau specifice, în diverse domenii industriale.
Ce roluri au coboții?
Modelele de roboti colaborativi care poartă emblema Universal Robots sunt diverse, putând fi astfel utilizate în funcție de ceea ce dorește clientul să realizeze cu ajutorul lui. UR3, UR5, UR10 sau UR16 sunt printre cele mai cunoscute modele de roboți colaborativi care permit o gamă extrem de variată de aplicații.
Există un model de cobot ideal pentru a fi utilizat pentru aplicații pe masă, respectiv pentru desfășurarea unor acțiuni de asamblare sau de vedere – UR3, dar și modele de roboti de paletizare care sunt utile mai ales pentru operațiunile de manipulare a produselor, chiar și celor mai voluminoase, pe care angajații trebuie să le sorteze, să le depoziteze sau să le pregătească pentru transport.
Principale avantaje ale unui braț mecanic
Roboții colaborativi sau brațele mecanice au fost realizate astfel încât să le fie ușurată munca angajaților. În acest sens, angajații trebuie să îi programeze, respectiv să îi însoțească în acțiunile pe care le au de făcut, neexistând nicio secundă riscul ca aceștia să le facă rău angajaților, mai ales că nu este vorba despre înlocuirea lor, ci despre colaborarea dintre cele două părți – om și robot.
De asemenea, utilizarea unui cobot duce la crearea unor spații industriale colaborative, respectiv a unor spații industriale în care nu există riscul apariției accidentelor, iar angajații lucrează în mod eficient la obținerea unor rezultate deosebite. Investițiile inițiale sunt rapid recâștigate, robotul este unul flexibil, iar rata de adaptabilitate la diverse tipuri de procese industriale este extrem de ridicată, considerându-se despre roboții colaborativi că sunt instrumente ale unui viitor modern.